با پیشرفت روز افزون علم و فناوری نیاز بشر به دستگاههای جدید بیشتر میشود و برای تولید، نیاز به دستگاههای سریعتر، دقیقتر و بهروزتر بیشتر احساس میشود. یکی از جدیدترین نوع موتور الکتریکی میتوان به استپموتور (Step Motor) یا استپر موتور (Stepper Motor) اشاره نمود.

استپرموتورها یا موتورهای پلهای موتورهای الکتریکی هستند که در آنها یکدور کامل یعنی ۳۶۰ درجه را به تعداد مساوی تقسیم نموده که به هرکدام پله (Step) گویند. مقدار فاصلهی هر دو استپ مقدار خاصی بر حسب درجه بوده که برای هر استپ موتور مشخص میگردد که دستگاه برحسب آن (واحد) دوران مینماید [۱].
وظیفهی اصلی این موتور تبدیل نیروی الکتریکی به مکانیکی است. این امر با کمک میدان مغناطیسی صورت میپذیرد. یکی از ویژگیهای بارز این نوع موتور کارکرد سادهی آن میباشد؛ قبل از تولید استپ موتورها نیاز به بکاربردن مکانیزمهای پیچیده برای تبدیل انرژی الکتریکی به مکانیکی بود که با این نوع موتورها به سادگی صورت میپذیرد.

استپموتور یا موتور پلهای:
استپموتور وسیلهای است که با کمک میدانهای مغناطیسی انرژی الکتریکی را به مکانیکی تبدیل میکند. این دستگاه چرخش گسسته و پلهای [۲] دارد و با هر پالس (از طرف کنترلر) به میزان مشخص (استپینگ) دستگاه دوران مینماید [۳].
عملکرد استپ موتورها:
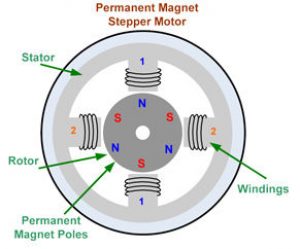
دستگاه دارای قطبهای ۱، ۲ ، ۳ و ۴ است. دستگاه با وارد شدن جریان به سیم +V و خروج جریان از هریک از سیمهای A، B، C و D آن را فعال میکند. مثلا با ورود جریان به سیم +V و خرج آن از سیم A، این قطب فعال میشود.
برای نمونه، در صورتیکه سیم A فعال گردد، قطب یک جنوب و قطب دو شمال است و در صورتیکه سیم B فعال گردد، عکس این امر اتفاق میافتد.

ساختار استپر موتورها:
استپر موتورها فاقد جاروبک (براشلس) هستند و با اعمال پالس موقیعت شفت (محور موتور) مشخص میشود. مقدار چرخش شفت بستگی به نوع موتور و تقسیمات کارخانه میباشد.
ساختار کلی استپرموتورها از یک سیلندر دندانهدار (چرخدندهای) آهنی و تعدادی الکترومگنت یا همان آهنربای غیر دائمی [۴] تشکیل شده است. با فعال و غیرفعال شدن هر الکترومگنت (Electromagnet) اولین سر این سیلندر دندانهدار به سمت آن حرکت مینماید تا با آن در یک راستا قرار بگیرد [۵].
این روش ادامه دارد و با فعال شدن هرکدام از الکترومگنتها و غیر فعال شدن الکترومگنت قبلی سیلندر آهنی (Rotor) به چرخش خود ادامه میدهد و ایجاد حرکت مکانیکی (دوار) مینماید.
حرکت مکانیکی دوار با استفاده از بالاسکرو (Ball Screw) و دندانه و شانه (Rack&Pinion) به صورت خطی در میآید.
مزایای استپر موتور (Advantages of stepper motor):
- هزینهی پایین کنترل
- گشتاور بالا در شروع حرکت و با سرعت کم
- ساختار ساده
- استحکام بالا
- عملکرد در یک سیستم کنترل باز
- هزینهی تعمییر و نگهداری پایین
- امکان لرزش کم
- امکان کارکرد در هر نوع شرایط محیطی
- استفاده در سیستمهای رباتیک در اندازههای بزرگ
- قابلیت اعتمادپذیری بالا
- زاویهی دوران متناسب با پالس ورودی
- پاسخ مناسب در شروع، پایان و جهت عکس چرخش
- عدم وجود جاروبک (افزایش استحکام و اعتماد پذیری)
- امکان چرخش با سرعتهای مختلف
معایب استپر موتور (Disadvantages of stepper motor):
- بازدهی پایین نسبت به سرووموتورها
- کاهش چشمگیر گشتاور با سرعت (گشتاور عکس سرعت است)
- دقت پایین
- نیاز به میکرو استپینگ (Microstepping) (برای حرکت آرام)
- عدم فیدبک
- امکان گرم شدن بالا
- عدم شتابگیری سریع
- توان خروجی پایین نسبت به نیروی وارده
- ایجاد صدای زیاد

[۱] حداقل دوران
[۲] به همین دلیل به این نام هم شناخته میشود
[۳] Stepping Angle
[۴] آهنربای های الکتریکی
[۵] دندانههای سیلندر فقط با الکترومگنت فعال همراستا خواهند بود و لزوما با دیگر الکترومگنتها مطابقت نخواهد داشت
شاید مقاله زیر نیز برای شما جالب باشد:
مراجع:
- www.machinetoolhelp.com
- www.en.wikipedia.org
- www.kollmorgen.com
- www.learn.adafruit.com